|
|
You are here: Wiki>SensorWeb Web>SensorWorld>SensorSimulation (28 Aug 2008, BirteLue)Edit Attach
Sensor Simulation
The sensor simulation component consists of a number of seperate independent sensor simulation processes, which emulate the behaviour of a single sensor. The sensor behaviour for example is determined by the manner of the movement like speed, direction, detection strategies and measurement results.Sensor Behaviour
At the moment the simulation of a sensor is based on a random sensor moving in a predefinded bounding box with various speed values.Sensor Design
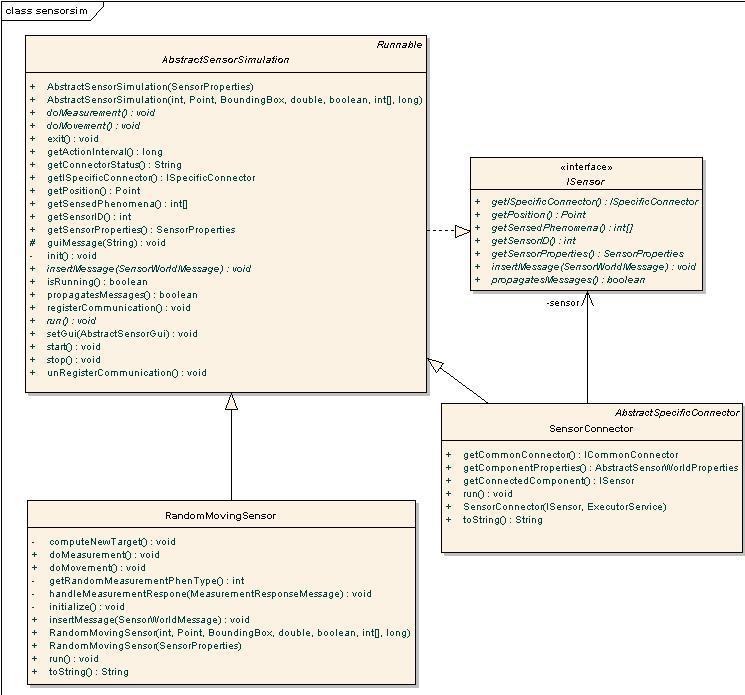
Each sensor is linked to the virtual communication layer by its specific sensor connector, which provides a bridge that forwards outgoing messages and accepts incoming messages from the message layer. As the processing of incoming messages is strongly depedendent on the sensor type the insert Message method has to be implemented to define the reaction to the different incoming messages types. In addition the implementation of a sensor needs information about the behaviour of the sensor. More precisely it has to be defined which actions the sensor is performing throughout his lifetime. The living of a sensor is simulated through a run method in which the different aspects of the sensor behaviour (move method) are controlled and conducted in a loop. The move method is responsible for calculating the next sensor position due to the sensor behaviour factors. It is easily possible to implement different sensors with a specific behaviour by using the Abstract Sensor Simulation class. This class delivers the functionality to link the sensor to the simulation and offers relevant methods like:- move()
- do Meausurement()
Plans
Further future plans are to integrate already developed sensor strategies to detect the phenomenon for example using sweep lines or other moving strategies.Edit | Attach | Print version | History: r10 < r9 < r8 < r7 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r9 - 28 Aug 2008, BirteLue
Legal Notice | Privacy Statement
 Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Ideas, requests, problems regarding Wiki? Send feedback
Ideas, requests, problems regarding Wiki? Send feedback