|
|
You are here: Wiki>Geostatistics Web>GeoViQua>Greenland>OpenSeaMapDepthMap (10 Apr 2013, DanielNuest)Edit Attach
Visualisation of Community-created Water Depth Maps

The Project
Background
OpenSeaMap (http://openseamap.org/) is the equivalent of OpenStreetMap (http://openstreetmap.org/) for waterways. In fact, is uses the OpenStreetMap database and works in close collaboration. However, there is one particular difference: There are no streets on the water (or at least not as simple "streets" as on land, but similar concepts), therefore the spatial information that has to be captured, modelled and visualised is quite different. OpenSeaMap consists of buoys, beacons (containing 20 to 30 attributes such as colours, angles, flash intervals ...), harbours, locations for diving, and more. OpenSeaMap also covers waterways and is actively used by kayaking groups to model their routes (e.g. entry points, difficulty). Beyond that, OpenSeaMap also integrates live data such as ship positions (AIS) and weather layers. Current areas of activity are:- Semantic Mediawiki for Watersports
- Focussing on integration of manifold wikis and models from kayaking associations, diving clubs and privately owned websites who provide similar pieces of very useful information.
- Water Depth Maps
- Situation: Water depths deeper than 200 Meters are well covered, but everything between 0 and 20 Meters is the most interesting!
- Discussion with BSH - will take ten more years before "Open Data" movement reaches them. Decision: Do it with crowdsourcing!
- Sonar and GPS are on every ship, use NMEA bus to connect a logger.
- Other project ( not open though crowdsourcing...): Teamsurv
- Testproject with artificial storage reservoir done - see test data below.
- Data in harbours are available.
- Current map: View > Development > Water depth
- Challenges
- Ship is constantly moving
- GPS elevation is useless
- Tide or up to 10m, but desired resolution is 0.5m!
- Different height reference systems across countries
- Cannot receive live correction data (e.g. EGNOS - to close to the horizon in many cases) with the typical ship GPS receiver
- Reference stations on land do not help since often to far away.
- Varying time scales - no changes on rocky grounds, a lot of changes in the Wadden Sea.
- Currently planned workflow
- Data collection (crowdsourced)
- Data post-processing
- Data visualisation
- Rendering
- Integration into OpenSeaMap map
- Support needed...
- for complicated height models used by surveyors.
- for "clever statistics"/data processing.
- Bridges, Water Levels, Tides
- Model the barriers in harbour entries that only allow passage at certain water levels, passing under bridges on rivers, ...
- Water levels of German rivers are integrated.
- Headwaters (interesting for canoists) missing, but contacts starting with governments worldwide.
- Tide calculation (in advance) desired.
Goals
The depth observations must be considerably processed and visualized with advanced techniques to convey the correct amount of information. Since the ships move on the water surface, measurements are not always taken perpendicular and corrections are needed. Also, the measurement systems precisions might vary. Therefore the visualisation of the data quality is very important. For this, the visualisation software Greenland shall be used. The visualisation of the data is crucial to understand it better for improvement of the post-processing, but also for the data collector and submitter as a direct visual feedback. In the best caseProject Management and Detailed Information
Contents from the OpenSeaMap wiki should not be duplicated here.- User stories: http://wiki.openseamap.org/wiki/OpenSeaMap-dev:Crowd_Sourced_Depth_Data
- Metadata: http://wiki.openseamap.org/wiki/OpenSeaMap-dev:De:Depth_meta_data
- Raw data description: http://wiki.openseamap.org/wiki/OpenSeaMap-dev:De:Depth_raw_data
- Data processing: http://wiki.openseamap.org/wiki/OpenSeaMap-dev:De:Depth_data_processing (with many important comments and good ideas)
Product Backlog
| Item | Priority |
Cost |
|---|---|---|
| As a user I need an understandable and visually appealing visualisation of the data he collected and interactively uploaded. | 1 | |
| As a user I want to upload NMEA and gpx files interactively and insert the data into a consistent O&M format. | 1 | |
| As a user I want to directly insert the transformed data into an SOS. | 1 | |
| As a user I want to see the locations of depth measurements coming from an Sensor Observation Service. | 2 | |
| As a user I want to see the density of observations along the ship track. | 2 | |
| As a user I want to inspect data density quality parameters for each observation and see a visualisation of selected quality parameters along the ship track. | 2 | |
| As a user I want to see the output depth map (after processing and correction). | 2 | |
| As a user I want to integrate ship movement data (e.g. from accelerometer) into the data collection. | 3 | |
| As a user I want to see textual and graphical (color) representations of the depth measurement. | 3 | |
| As a user I want to see the ship track (connecting the measurement points, or independen points?). | 4 | |
| As a user I want to define ship and sensor metadata in a web form. The data must than be transformed to a standardized format (SensorML) and be available for data insertion. | 4 | |
Example Data
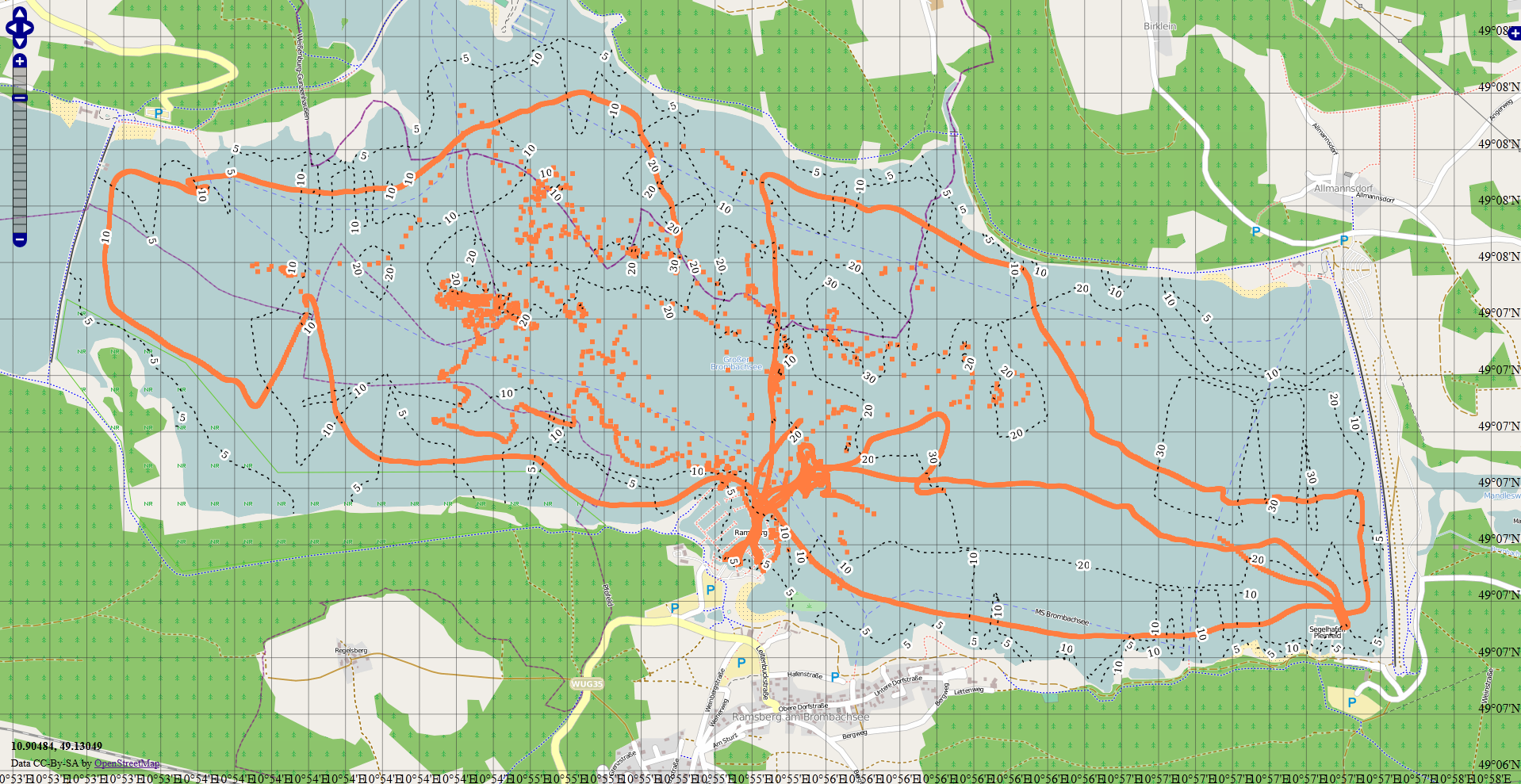
You can download a sample data survey for the Brombachsee (see http://map.openseamap.org/map/?zoom=14&lat=49.13078&lon=10.92363&layers=BFTFTTTFFFF0TF) here: Brombachsee-depth-data_originals.zip. It consists of four files:
It consists of four files: - Two GPX files with the track of the ships movement
- Two .NMEA logger files.
Ideas
- Save the measured observations in an SOS with uncertainty and quality information. -- DanielNuest - 2013-01-08
- Model the sensor metadata (ship size, sensor location on ship, ...) with SensorML 2.0. -- DanielNuest - 2013-01-08
Contact
Project at 52°North: DanielNuest OpenSeaMap Community: Markus BärlocherMetadata
- Topic created by: DanielNuest
- Topic created on: 2012-12-21
License

This work is licensed under a Creative Commons Attribution 3.0 Unported License.


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
2012-01-08_brombachsee-tracks.PNG | manage | 718 K | 08 Jan 2013 - 09:44 | UnknownUser | |
| |
Brombachsee-depth-data_originals.zip | manage | 429 K | 08 Jan 2013 - 09:30 | UnknownUser |
{kind=link}
{kind=link}
Edit | Attach | Print version | History: r5 < r4 < r3 < r2 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r4 - 10 Apr 2013, DanielNuest
Legal Notice | Privacy Statement
 Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Ideas, requests, problems regarding Wiki? Send feedback
Ideas, requests, problems regarding Wiki? Send feedback