|
|
You are here: Wiki>SensorWeb Web>SensorPlatformFramework>SensorVis (26 Nov 2012, DanielNuest)Edit Attach

SensorVis - Real Time Sensor Visualisation
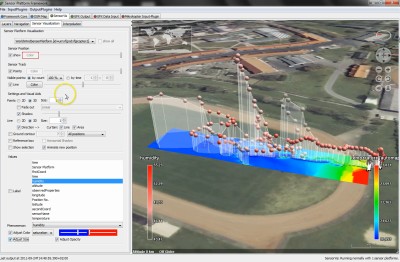
This page presents SensorVis, a plugin for the Sensor Platform Framework (SPF) that allows live visualisation of data collected by mobile sensor platforms.
About
The Problem
Technological advances allow us to use unmanned aerial vehicles (UAV) to observe my different kinds of phenomena for example for observing plumes of pollutants in disaster scenarios. In those cases the phenomenon changes dynamically and up to date information is crucial. However, the spatio-temporal variability of the data is rarely modelled and processing of the data is not possible in real time.Idea
As a first step we suggest using methods based on computer graphics and geovisualisation to present the sensor platform's movement history together with the processed data, in this case interpolations, to increase the understanding of the data that the process output is based on und eventually better understand the observed property.Solution
SensorVis provides adapted visualisation of the sensor with specific techniques to help users understand the input data. These techniques are implemented in a 3D virtual globe environment based on NASA World Wind. The interpolation processing is outsourced to INTAMAP. In a highly interactive environment a user can explore real-time observations with different methods and calculate interpolations using any subset of observations. The first version of this software was developed in the diploma thesis Visualising Interpolations of Dynamic Phenomena Observed by Mobile Sensors by Daniel Nüst.
Demo Video
You can download a video featuring a live demo with the ifgicopter and integrated screencast in HD (mp4 format): 720p (146MB) or 1080p (296 MB).Development
Source Code
The source code is available in the 52N repositories as a Maven project und GPL license. To check out the source code follow the steps below (using Eclipse and the m2e plugin): https://svn.52north.org/svn/swe/incubation/ifgicopter/spf-sensorVis/Binary Download
To be done...Check-out and build Project
Prerequisites
- Eclipse, http://eclipse.org/
- m2e plugin
- Including the SVN SCM connector (m2e-subsersive or m2e-subclipse, depending on your Eclipse configuration/your SVN adapter)
- SVN connector, see Help > Install New Software... > Use --All Available Sites-- and filter for svn
- m2e plugin
- Maven (local installation often advantageous over embedded version in m2e),
mvnmust be on the path - SensorPlatformFramework binary or source installation
Step-by-step Instuctions
- Start Eclipse
- Check out the project from the source code management (SCM) system
- Open perspective "SVN Repository Exploring"
- New > Repository location
-
https://svn.52north.org/svn/swe/incubation/ifgicopter/ - (add login for developers only)
- Click Finish
- Navigate to
https://svn.52north.org/svn/swe/incubation/ifgicopter/spf-sensorVis/trunk - Right click on the directory
trunk- Select "Check out as Maven Project ..." (this option is only available if you installed the SVN SCM connector for m2e properly!)
- Click Finish
- Alternatively, you can go via File > New > Project... > Maven > Checkout Maven Projects from SCM. If there is no svn protocol in the drop-down menu next to SCM URL:, then please install m2e connectors by clicking on the link to the m2e Marketplace in the bottom of the window.
- Open perspective "SVN Repository Exploring"
- You have a new Eclipse project called spf-sensorVis
- Open Run configurations
- Maven Install
- Add new run configuration
- Name: Package SensorVis
- Base directory:
- Click "Browse Workspace...", then select the project folder. The field should show ${workspace_loc:/spf-sensorVis}
- Goals: package
- Details: http://maven.apache.org/guides/getting-started/index.html
- Add new run configuration
- Maven Install
- Run Package SensorVis
- The folder
/target/spf-sensorVis-0.2is created, as are some other directories and files. (Please note that version numbers might change!)
- The folder
- Run the application
- Extract the contents of the archive
spf-sensorVis-0.2.zip(or copy the aforementioned folder) to the SPF installation. Click "yes" when your are asked to integrate the folder. Normally you can overwrite all existing files. - Follow the instructions here: SensorPlatformFramework
- Run SPF by clicking the appropriate file for your platform (depending on operating system and plaform architecture)
- Go to the tab SensorVis
- Extract the contents of the archive
Check-out for Developers
- Follow the Instructions in "Check-out and build Project" above
- Check out the source of the SensorPlatformFramework, importantly spf-core (see the SPF page for instructions)
- Add spf-sensorVis to the plugin configuration of spf-core, see SensorPlatformFramework
- Run the class org.n52.ifgicopter.spf.SPFRegistry from spf-core as a Java Application (later referred to as SPFRegistry)
- Configure the Run Configuration (to include the native dependencies for OpenGL) for SPFRegistry
- Open the tab Arguments
- Add VM arguments:
-Djava.library.path=${workspace_loc}/spf-sensorVis/lib-natives/<your platform identifier> - Replace <your platform identifier> with x86 or x64, depending on your OS architecture.
- Copy the contents of the folder
spf-sensorVis/src/main/configtospf-core/config/sensorvis - Run SPFRegistry
Developers
Tasks
- Add used licenses to the table for 52°North software
- Use the public Maven repository for World Wind, see http://forum.worldwindcentral.com/showthread.php?t=31470
- Implement coloured sensor track line with latest WorldWind from SVN, search code for
public void setValueColoredTrackVisible(boolean b) - KmlOutputPlugin with interpolation images and track
- Externalize Strings from GUI, multilanguage support
Brainstorming Area
- An integration of more sophisticated GIS analysis functions could be useful, for example by extending existing GIS, or by extending the generic functionality ourselves -- DanielNuest - 2011-11-25
- Extensions (derived from Raimund's work)
- Make sensor type searchable
- Implement actual history: extra table for SensorML documents, sensor_docs, and their searchable parts (valid time, type, keywords, ...), table sensors just contains identifiers and sensor_id_sir, new table sensor_to_sensor_docs
- improve simple response
- select what is contained (content selection similar to GetCapabilities)?
- ...
Metadata
- Topic created by: DanielNuest
- Topic created on: 2011-09-27
License

This work is licensed under a Creative Commons Attribution 3.0 Unported License.


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
SensorVis-screenshot-001.png | manage | 1 MB | 24 Jan 2012 - 07:51 | DanielNuest | |
| |
SensorVis-screenshot-001_small.jpg | manage | 33 K | 24 Jan 2012 - 07:51 | DanielNuest | |
| |
sensorvis-fading-functions.png | manage | 7 K | 24 Jan 2012 - 07:47 | DanielNuest | |
| |
sensorvis-logo-1.png | manage | 4 K | 24 Jan 2012 - 07:51 | DanielNuest | |
| |
sensorvis-logo-aboutscreen.png | manage | 4 K | 24 Jan 2012 - 07:44 | DanielNuest |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Edit | Attach | Print version | History: r14 < r13 < r12 < r11 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r13 - 26 Nov 2012, DanielNuest
- Toolbox
-
 Users
Users
-
 Index
Index
-
 Search
Search
-
 Changes
Changes
-
 Notifications
Notifications
-
 RSS Feed
RSS Feed
-
 Preferences
Preferences
- Webs
-
 AI_GEOSTATS
AI_GEOSTATS
- Documentation
- GEONETCAST
- Geoprocessing
- Geostatistics
- Metadata
- Projects
- Sandbox
- Security
- Semantics
- SensorWeb
- System
- V3d
- Categories
Legal Notice | Privacy Statement
 Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Ideas, requests, problems regarding Wiki? Send feedback
Ideas, requests, problems regarding Wiki? Send feedback